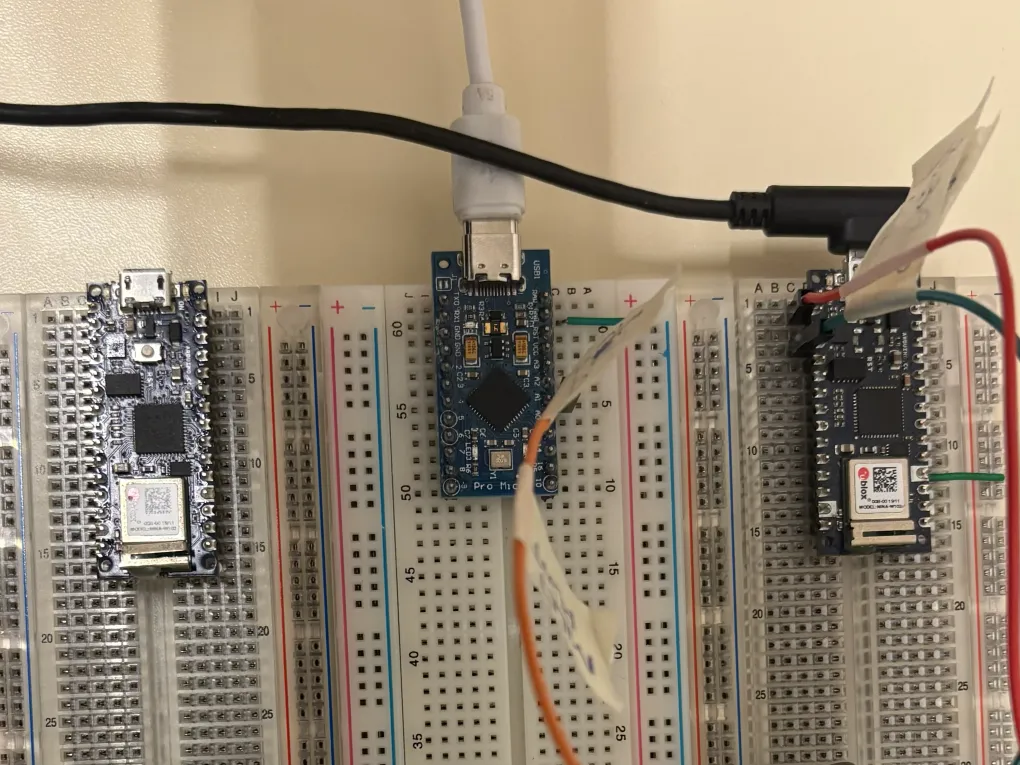
Yesterday, I successfully made my 9V DC circuit and ran some basic tests using old Arduino code. Today’s goal was more ambitious: writing the full production code to track the phone’s various states and prepare the data to be sent to the pi via the Serial Monitor.
I hit a brief moment of panic when the hook detection and dialing weren’t registering at all. I worried I did something wrong with the circuit, but the fix was actually quite simple. First, I realized I needed to use analog pins instead of digital ones to get a more granular reading of the voltage and spikes. Second, I had moved my measurement points from the positive to the negative side of the circuit, which inverted my logic. Now, when the phone is on-hook, the value reads near 0 instead of 900. After accounting for these hardware shifts in the code, everything worked perfectly.
Functional Requirements
The Arduino code is designed to handle three main tasks:
Hook Detection: Monitor if the handset is on or off the hook.
Pulse Dialing: Detect and count the pulses to determine which number was dialed.
Relay Control: Open and close the relays to manage the bell and the audio connection.
Communication Protocol
To communicate with the Raspberry Pi, I established a set of Serial codes. This allows the Pi to act as the “brain” while the Arduino handles the real-time hardware sensing.
Outgoing signals to the Pi:
TX_OFFH: Phone picked up.
TX_ONH: Phone hung up.
TX_N[0-9]: Number dialed (e.g., TX_N5 for digit 5).
note: X stands for the phone number. T1 is phone 1, T2 is phone 2.
Incoming commands from the Pi:
R1_OPEN / R1_CLOSE: Connect or disconnect the phone lines.
The code
The code uses a threshold-based system to distinguish between a temporary “break” (a pulse during dialing) and a long “break” (hanging up the phone). By measuring the time the voltage stays low—using a timeout of 600ms—the code can accurately determine if the user is finished dialing a digit or has ended the call entirely.
struct PhoneConfig {
int pickupThreshold;
int hangupThreshold;
int timeout;
};
const PhoneConfig phoneConfigs[2] = {
// pickupThreshold (High/Rising), hangupThreshold (Low/Falling), timeout(ms)
{45, 20, 600}, // T1
{60, 30, 600} // T2
};
//--- STATE & VARIABLES
struct PhoneState {
bool isOffHook;
int pulseCount;
bool inPulse; // currently in a pulse break
unsigned long lastPulseTime;
bool isActuallyHangingUp; // distinguish pulse vs hangup
};
PhoneState phoneStates[2] = {
// isOffHook, pulseCount, inPulse, lastPulseTime, isActuallyHangingUp
{false, 0, false, 0, false}, // T1
{false, 0, false, 0, false} // T2
};void processLine(int value, int phoneID) {
const PhoneConfig &config = phoneConfigs[phoneID];
PhoneState &state = phoneStates[phoneID];
// Off-Hook Detection
if (!state.isOffHook && value > config.pickupThreshold) {
state.isOffHook = true;
state.pulseCount = 0;
Serial.print("T");
Serial.print(phoneID + 1);
Serial.println("_OFFH");
}
// Dial & On-Hook Detection
if (state.isOffHook) {
// Detection of a pulse
if (value < config.hangupThreshold && !state.inPulse) {
state.inPulse = true;
state.lastPulseTime = millis();
}
// Count the pulses
else if (value > config.pickupThreshold && state.inPulse) {
state.inPulse = false;
state.pulseCount++;
state.lastPulseTime = millis();
}
// Is the pulse a Digit or a Hang-up?
if (millis() - state.lastPulseTime > config.timeout) {
if (state.inPulse) // inPulse means the voltage is low -> doesn't go back
// up? => HANGUP
{
state.isOffHook = false;
state.inPulse = false;
state.pulseCount = 0;
Serial.print("T");
Serial.print(phoneID + 1);
Serial.println("_ONH");
} else if (state.pulseCount >
0) // Line stayed high & pulseCount > 0 -> DIGIT FINISHED
{
int digit = (state.pulseCount == 10) ? 0 : state.pulseCount;
Serial.print("T");
Serial.print(phoneID + 1);
Serial.print("_N");
Serial.println(digit);
state.pulseCount = 0;
}
}
}
}So at the end of the day, I could manage the whole state of both phones. And all the serial communication was prepared to be sent to the Pi.